Use Cases
Case studies and use cases of CC-Link IE TSN and other CC-Link family network technologies are introduced, along with the benefits of their adoption. Have a look as a reference when selecting an industrial network.
CC-Link IE TSN

2024-10
2-Axis Turret-Type Automatic Center Winder
Unify motion, I/O, and information communication networks to optimize different communication cycles
- FUJI TEKKO

2024-10
Industrial Printing
High synchronization accuracy in multi-axis motion control, improved quality and flexible scalability through a single network
- Keller

2024-10
Puzzle Cube-Solving Robot
Using advanced motion control with time synchronization accuracy within ±1μs, the puzzle cube was solved in just 0.305 seconds.
- Mitsubishi Electric

2024-10
Cartesian Wrapping Machine
Multi-axis motion control and real-time torque data collection for improved lapping quality
- Marunaka Tekkosho

2024-10
Sanitary Manufacturing Equipment
CC-Link IE TSN Class A enables network integration. It reduces maintenance work time and can flexibly respond to system upgrades.
- Chan Li Machinery

2024-10
Surface Activation Device
Enables communication over the same trunk line as IP communication, enabling remote, real-time monitoring of equipment information and control according to the environment, improving productivity and quality.
- Orisol

2024-09
Lithium-ion Battery Manufacturing Machine (Stacking Machine)
Large-volume data from a vision sensor can be processed while communicating with an industrial PC on the same network without affecting motion control
- (Use Case)
2024-09
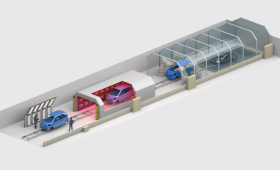
Automotive(Paint Shop)
Both general and safety communications can be mixed on one network. And even when mixed with IP communication, deterministic performance of the control communication is maintained.
- (Use Case)

2024-09
Semiconductor Process Equipment
Software implementation enables the reduction of design effort by utilizing existing design assets
- (Use Case)
2024-09
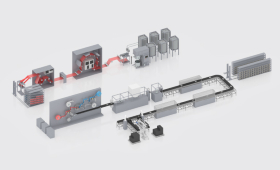
Lithium-ion Battery Production Line
Improve productivity by optimum control when mixing equipment with different communication cycles
- (Use Case)


